Российский беспилотник проехал 2500 км: что выяснилось в ходе эксперимента?
Экспериментальный автомобиль-беспилотник от российской компании НПО «СтарЛайн» за 10 дней преодолел расстояние в 2500 км. Большую часть пути от Санкт-Петербурга до Казани он провел в автономном режиме, лишь на сложных участках управление брал на себя водитель-испытатель.

Прототип изготовлен на базе Skoda Superb и оснащен системой третьего уровня автономности с двумя режимами управления. Первый режим удерживает автомобиль в полосе, распознает разметку, дорожную обстановку, определяет полосу движения и рассчитает маршрут. Второй режим пока в процессе доработки, но он позволит беспилотнику, в обозримом будущем, двигаться при плохой погоде, отсутствии разметки и наличии большого количества помех (как пример, городское движение).
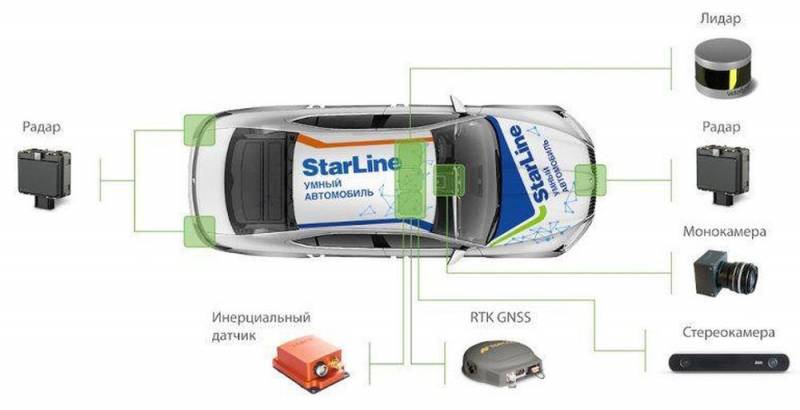
В настоящее время разработчики создают высокоточную карту с путевыми точками. Место нахождения можно будет определить с помощью спутникового приемника, инерционной навигации и одометрии (это использование данных о движении приводов для оценки перемещения). Так что помогать перемещаться беспилотнику будет целый набор различных сенсоров, от системы технического зрения до лидара. Кстати, система «Сфера», о которой мы сообщали ранее, тоже пригодится.
К слову, в процессе эксперимента были выявлены и недостатки. Так что водитель-испытатель действительно пригодился. Ведь на некоторых участках беспилотник просто не мог распознать дорожное полотно. Его вычислительная система не справлялась с большим объемом информации, случались задержки, т.е. она «тормозила». Но разработчики уже активно работают над устранением недостатков.

Прототип изготовлен на базе Skoda Superb и оснащен системой третьего уровня автономности с двумя режимами управления. Первый режим удерживает автомобиль в полосе, распознает разметку, дорожную обстановку, определяет полосу движения и рассчитает маршрут. Второй режим пока в процессе доработки, но он позволит беспилотнику, в обозримом будущем, двигаться при плохой погоде, отсутствии разметки и наличии большого количества помех (как пример, городское движение).
В настоящее время разработчики создают высокоточную карту с путевыми точками. Место нахождения можно будет определить с помощью спутникового приемника, инерционной навигации и одометрии (это использование данных о движении приводов для оценки перемещения). Так что помогать перемещаться беспилотнику будет целый набор различных сенсоров, от системы технического зрения до лидара. Кстати, система «Сфера», о которой мы сообщали ранее, тоже пригодится.

К слову, в процессе эксперимента были выявлены и недостатки. Так что водитель-испытатель действительно пригодился. Ведь на некоторых участках беспилотник просто не мог распознать дорожное полотно. Его вычислительная система не справлялась с большим объемом информации, случались задержки, т.е. она «тормозила». Но разработчики уже активно работают над устранением недостатков.
Информация